Nullmax Paper Accepted at ICCV 2025: HiP-AD Introduces a Novel One-Stage End-to-End Architecture for Autonomous Driving
Date: 2025-07-02On June 25th, the International Conference on Computer Vision (ICCV 2025) officially announced its list of accepted papers. Nullmax’s perception team has made it to the list with its latest research on autonomous driving planning and decision-making: "HiP-AD: Hierarchical and Multi-Granularity Planning with Deformable Attention for Autonomous Driving in a Single Decoder." This achievement further demonstrates Nullmax’s deep expertise and innovation in core end-to-end autonomous driving technologies.
Paper link: https://arxiv.org/abs/2503.08612
ICCV, organized by the IEEE, is one of the world’s top three academic conferences in computer vision. Held biennially, ICCV attracts cutting-edge research from both academia and industry worldwide. ICCV 2025 received a total of 11,239 submissions, with only 2,699 papers accepted, yielding a rigorous acceptance rate of 24%. Nullmax’s inclusion is a testament to its world-class research capabilities in the design of new-generation autonomous driving systems.
HiP-AD: A New Hierarchical, Multi-Granularity Planning Framework for Closed-Loop Driving
In this work, Nullmax proposes a novel planning framework—HiP-AD(Hierarchical and Multi-Granularity Planning for Autonomous Driving)—that unifies perception, prediction, and planning within a single Transformer decoder. HiP-AD enables true end-to-end closed-loop control optimization, all while avoiding reliance on large language models and their massive parameter sizes.
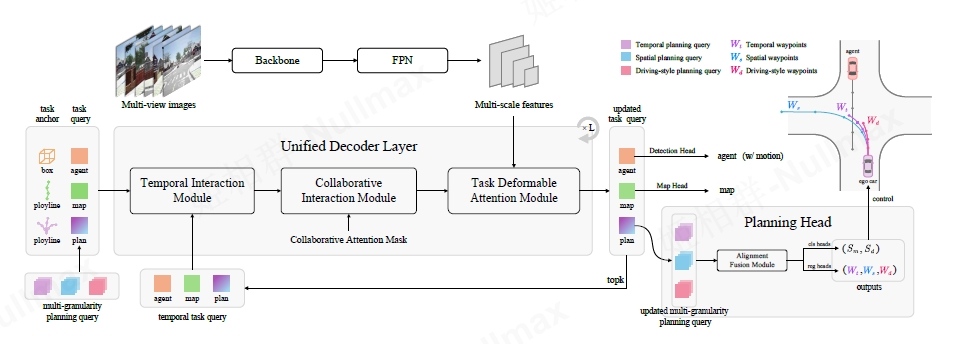
HiP-AD introduces several breakthroughs in modeling:
Multi-Granularity Planning Queries: Incorporates temporal, spatial, and driving-style trajectory waypoints to enhance expressiveness and generalization.
Planning Deformable Attention: Focuses attention on key areas around trajectories to more precisely extract features from images.
Unified Decoder Architecture: Breaks traditional module silos, allowing perception, prediction, and planning tasks to co-optimize in a shared space—improving information flow and efficiency.
These innovations lead to significant improvements in closed-loop control success rate and stability. HiP-AD has achieved top-tier performance on multiple industry-standard benchmarks, including Bench2Drive and nuScenes.
Multi-Trajectory Generation: Human-Like Flexibility in Path Planning
Traditional E2E models typically predict a single driving trajectory, which can limit adaptability in dynamic environments.
HiP-AD introduces a multi-trajectory generation strategy, producing multiple trajectory candidates across temporal, spatial, and driving behavioral dimensions. These candidates are then evaluated, and the optimal path is selected based on the current driving context.
This design significantly improves the model’s adaptability and robustness in complex, real-world traffic scenarios, enabling more human-like, flexible driving decisions.
Closed-Loop Capability: From “Thinking Well” to “Driving Steady”
A common challenge in end-to-end autonomous driving lies in the gap between trajectory prediction and real-world execution. Many models perform well in open-loop evaluation—predicting trajectories based on historical data—but fail to account for execution errors or environmental feedback, leading to unstable performance in real traffic.
HiP-AD addresses this challenge with a true closed-loop design, allowing the system to actively control the vehicle and respond to real-time feedback. This ensures safe execution of tasks such as obstacle avoidance, lane changes, and handling unexpected situations.
In the Bench2Drive closed-loop benchmark, a leading evaluation standard in the field, HiP-AD achieved SOTA (State of the Art) performance, ranking #1 among comparable architectures. This underscores the model’s superior reliability and deployability in real-world autonomous driving systems.

Powering the Brain of New-Gen AD: HiP-AD Empowers Nullmax Intelligence
At Nullmax, we specialize in translating cutting-edge research into commercial-ready autonomous driving solutions.
HiP-AD has been integrated into Nullmax Intelligence, the company's new-generation end-to-end autonomous driving technology launched in 2024. By incorporating multi-granularity reasoning and real-time decision-making capabilities, HiP-AD enhances the system’s ability to understand and respond to complex urban and highway driving scenarios.
This integration significantly boosts the intelligence, adaptability, and safety of the overall driving system—laying a solid foundation for high-performance, scalable autonomous driving deployments.
Research Meets Reality—Join Us to Drive the Future
Nullmax remains committed to building a vision-centric, platform-based intelligent driving system. Our core research spans perception, planning, and end-to-end autonomous driving—reflected in our recurring publications at top-tier conferences such as CVPR, ECCV, and ICCV.
We firmly believe in bridging the gap between academic breakthroughs and commercial application, ensuring that our research can be rapidly transformed into deployable, mass-production-ready solutions.
As autonomous driving technology continues to evolve, we welcome passionate, talented individuals to join Nullmax on this journey. Let’s drive innovation together and shape the intelligent future of mobility.
Media Relations
media@nullmax.aiRelated Articles
- Nullmax AEB System: Return to the Essence of Driving Safety 2025-05-30
- Nullmax and Renesas Forge Strategic Partnership to Deliver Competitive ADAS Solutions for the Global Market 2025-02-25
- Nullmax Wins 6th Gasgoo Awards 2024-10-24
- Nullmax's Vision-Only Tech: Eyes for Autonomous Driving and Robotics to Explore the World 2024-09-03
- Nullmax Launches 'Nullmax Intelligence': End-to-End Autonomous Driving Technology 2024-07-16