
Pioneer of Embodied Intelligence,
Realizing Self-Driving Progressively.
Nullmax possesses outstanding technical expertise in computer vision and deep learning, with a full-stack autonomous driving system, MAX, that covers upper-layer applications, middleware, and cloud data systems, it is integrated into an advanced foundational architecture, serving as a general AI platform that enables machines to perceive, learn, and interact as proficiently as humans.






Nullmax Intelligence
The new generation of autonomous driving technology features vision-only, no map, and multimodal.
The NI System combines a multimodal model with a brain-inspired safety model, enabling vehicles to see, hear, and read. Meanwhile, Nullmax extends AI applications to passenger transport, cargo, and robotics, allowing interaction with the physical world through visual observation and cognition.
The NI System combines a multimodal model with a brain-inspired safety model, enabling vehicles to see, hear, and read. Meanwhile, Nullmax extends AI applications to passenger transport, cargo, and robotics, allowing interaction with the physical world through visual observation and cognition.

Vision-Only, No Map, Multimodal
Nullmax achieves precise obstacle detection and 3D reconstruction using vision-based perception, enabling real-time generation of local maps and true mapless operation without LiDAR, stereo cameras, or high-precision maps. The vision-centered multimodal approach also integrates sound, text, and gesture inputs.
Innovative E2E Approach
The end-to-end model enables scene comprehension and behavior planning in one step, allowing intelligent, flexible responses to complex driving scenarios, while enhancing interpretability through visual feedback and scene descriptions.
The E2E approach integrates a brain-inspired safety model utilizing neural networks, equipping autonomous driving with a biological instinct to "seek benefits and avoid harm".
The E2E approach integrates a brain-inspired safety model utilizing neural networks, equipping autonomous driving with a biological instinct to "seek benefits and avoid harm".
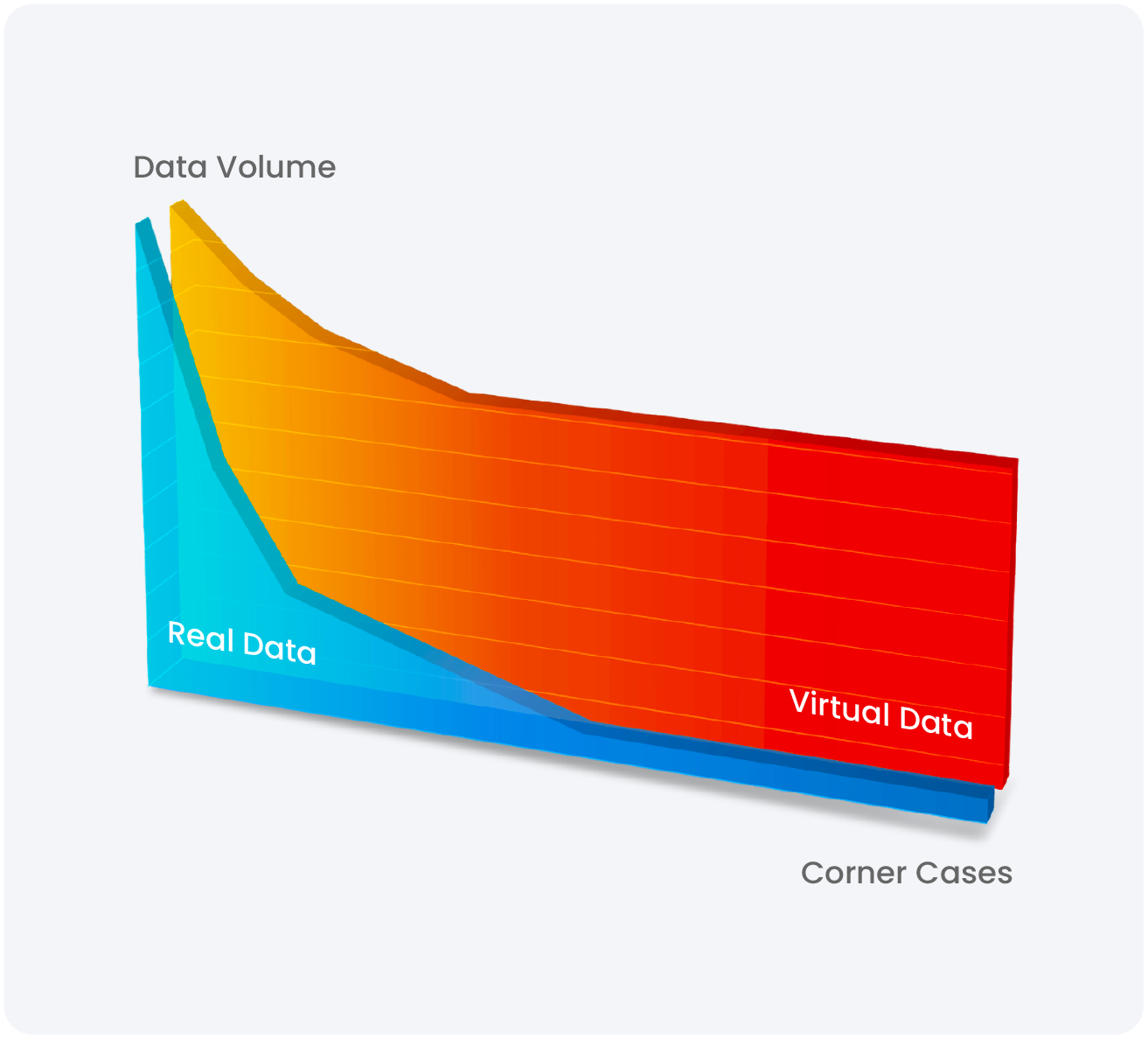
Foundation Architecture Data Platform: Real Data + Virtual Data
Building on extensive real-world data, Nullmax uses AIGC to generate large-scale simulated data, supplementing scarce valuable data and accelerating model development and iteration. The entire process from data acquisition, mining, and annotation to model training, evaluation, and release is a fully automated.
- Vision-based data platform
- Real-world data + AIGC simulated data provides richer and larger-scale datasets
- The entire process of data is fully automated
- Improved model performance, shorter data cycles, and lower costs
- Support embodied intelligence applications like autonomous vehicles and robots
- Generates simulated data controllably based on real-world data
- Safer and lower cost, especially for acquiring data from dangerous scenarios
- Continuously generates corner case data
- Supports element generation, image generation, and video generation
- Generates and predicts driving behaviors and corresponding videos based on world model
- Supports full data workflows for mass-produced and data collection vehicles
- Automated 2D, 3D, and 4D data annotation for various tasks
- Efficiently filter and manage data to quickly find what you need
- A closed-loop system for model training, evaluation, and release.
AI Algorithm Platform Multi-purpose, Growable, Platform-based
By tokenizing multimodal inputs, abstracting multimodal model inference and autonomous driving function integration, and utilizing the MaxOS middleware platform, the Nullmax algorithm platform supports various vehicle models, adapts to different sensor configurations, and is easy to deploy.
All algorithmic capabilities are reusable in robotics, enabling visual perception, learning from human behavior, and interacting with the physical world.
All algorithmic capabilities are reusable in robotics, enabling visual perception, learning from human behavior, and interacting with the physical world.