入选CVPR 2024!Nullmax 提出多相机3D目标检测新方法QAF2D
发布时间:2024-02-27CVPR(IEEE Conference on Computer Vision and Pattern Recognition)是计算机视觉和模式识别领域的顶级会议,其收录的论文代表了计算机视觉领域的最新发展方向和最高研究水平。作为计算机视觉领域的世界三大顶会之一,CVPR在全球范围内有着极其广泛的影响力和严苛的录用标准。研究成果入选CVPR,也标志着Nullmax的创新成果和前沿技术持续获得国际顶级会议认可。
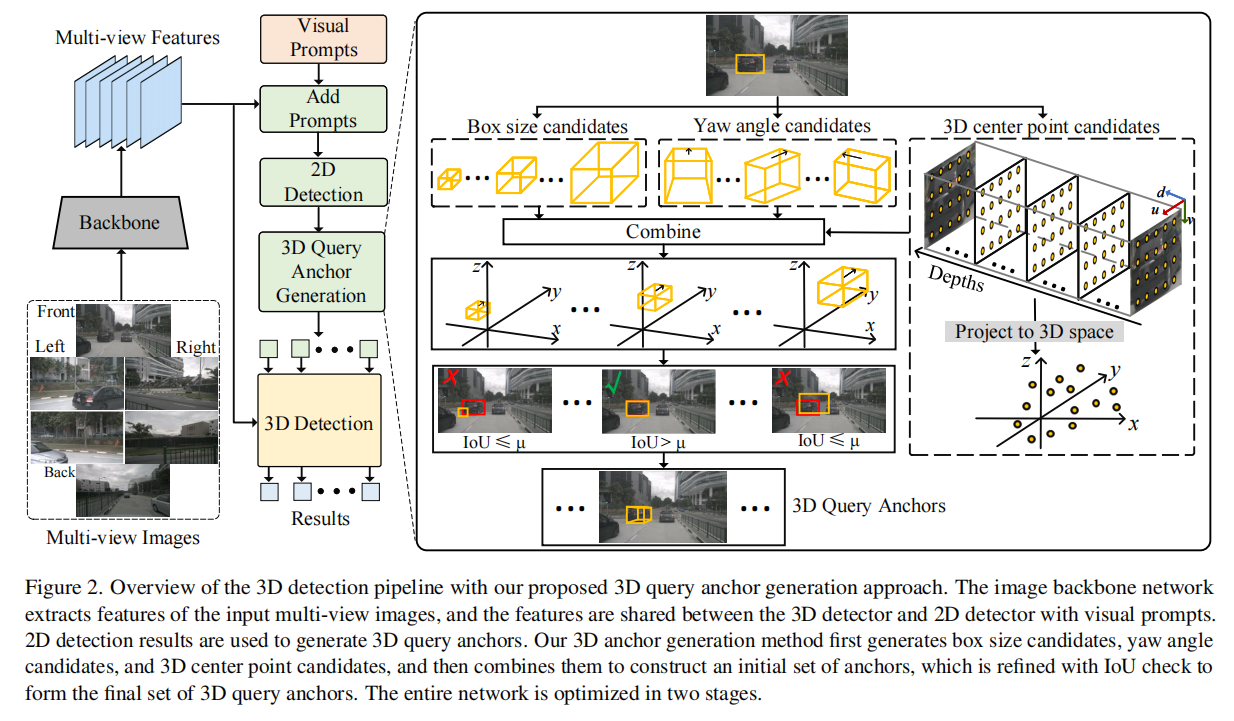
论文中,Nullmax提出了一种提升3D目标检测的新方法QAF2D(Query Anchor From 2D),通过2D检测结果指导生成3D查询锚点(Query Anchor),显著提升了多相机3D目标检测的性能。同时,Nullmax利用视觉提示(Visual Prompt)设计了一套两阶段的优化方法,让2D和3D检测器共用图像特征提取网络,在不影响3D检测器性能的情况下,降低模型训练和部署的资源消耗。
在自动驾驶当中,3D目标检测是障碍物检测等任务的关键技术。更好的3D目标检测性能,可以提升自动驾驶系统的整体表现,尤其是增强系统驾驶的安全性。将QAF2D应用到实际的量产车型上,将可以进一步提升智能驾驶的整体表现,同时降低部署和开发时的硬件资源需求。
作为一家领先的自动驾驶技术企业,Nullmax拥有强大的技术团队和一流的研发实力,未来Nullmax将继续探索3D目标检测的最新技术,不断提升感知系统的性能和鲁棒性,将研究成果应用于实际场景,为自动驾驶技术的落地贡献力量。
媒体垂询
media@nullmax.ai相关文章
- 高效交付有章法,Nullmax量产工程深度解析 2024-04-19
- 打造智驾「新质生产力」,Nullmax BEV-AI技术架构带飞上分! 2024-03-28
- 创新不停步,Nullmax感知论文获旗舰期刊RA-L录用 2024-01-18
- Nullmax出席2023全球自动驾驶峰会 揭秘BEV-AI技术架构加速量产方案演进 2023-12-22
- Nullmax创始人兼CEO&CTO徐雷博士入选「2023中国科技出行产业科学企业家 TOP10」 2023-12-06