创新不停步,Nullmax感知论文获旗舰期刊RA-L录用
发布时间:2024-01-18在自动驾驶当中,三维单目标跟踪是一项重要的感知任务。许多的自动驾驶子功能,比如AEB、自动跟车等,需要跟踪周围环境中的特定目标并持续计算目标的状态,比如路径前方的最近车辆/行人(CIPV/CIPP)的位置和运动情况,进而确保自动驾驶的安全、舒适和高效。
其中,基于点云的3D单目标跟踪是一个热门的研究课题,但由于点云的稀疏性和不规则性,这项工作仍然具有相当大的挑战性。为此,作者团队提出了一种创新的Transformer孪生网络,实验结果显示该算法拥有优异的3D单目标跟踪性能,并表现出了良好的泛化能力。
这篇论文题为《Multi-Correlation Siamese Transformer Network with Dense Connection for 3D Single Object Tracking》,运用多次特征关联和密集连接的Transformer孪生网络,显著提升了稀疏点云下三维单目标跟踪算法的性能。
作为一流的自动驾驶技术企业,Nullmax拥有极为出色的视觉感知能力,在基于视觉的单目标跟踪基础上,增加基于点云的3D单目标跟踪将可以进一步强化自动驾驶方案的整体性能。同时,强大的多模态感知和融合能力同时也使得Nullmax能更好地满足行业多样化需求。
论文地址:http://arxiv.org/abs/2312.11051
代码开源地址:https://github.com/liangp/MCSTN-3DSOT
论文主要内容:
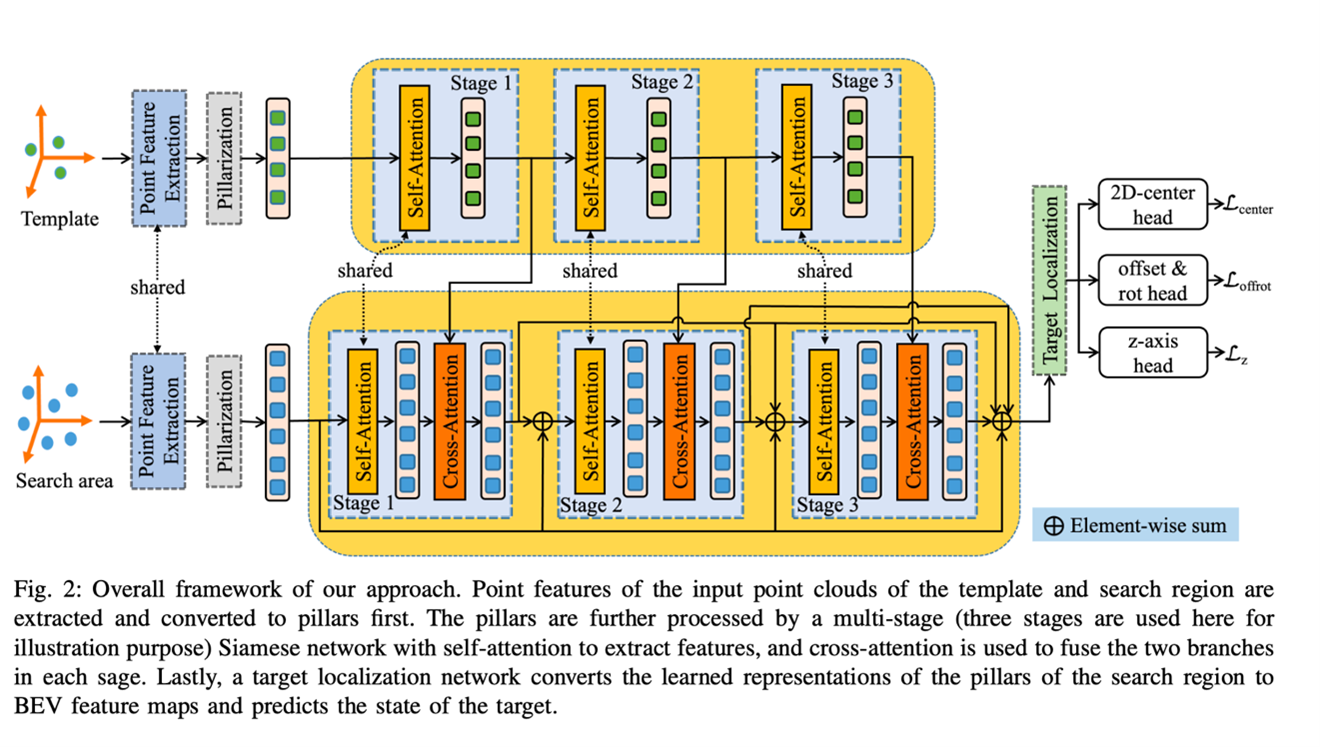
(算法整体框架)
编后语:
媒体垂询
media@nullmax.ai相关文章
- 高效交付有章法,Nullmax量产工程深度解析 2024-04-19
- 打造智驾「新质生产力」,Nullmax BEV-AI技术架构带飞上分! 2024-03-28
- 入选CVPR 2024!Nullmax 提出多相机3D目标检测新方法QAF2D 2024-02-27
- Nullmax出席2023全球自动驾驶峰会 揭秘BEV-AI技术架构加速量产方案演进 2023-12-22
- 媒体声音|量产起势,渐进加速,Nullmax背后的自动驾驶长期主义 2023-08-22